RoboTwin 2.0 | arxiv 2025.8.27(preprint) | Paper Reading
RoboTwin 2.0: A Scalable Data Generator and Benchmark with Strong Domain Randomization for Robust Bimanual Robotic Manipulation
这篇文章将Diffusion应用到3D空间。是在diffusion policy基础上进一步提升了策略的能力。
| 工作类型(首次/改进) | 技术路线 | 创新点 | 日期 |
|---|---|---|---|
| 改进 | simulation data collection | 自动化仿真数据生成pipline的改进引入多模态反馈代码生成 | 2025-10-03 |
1.What?
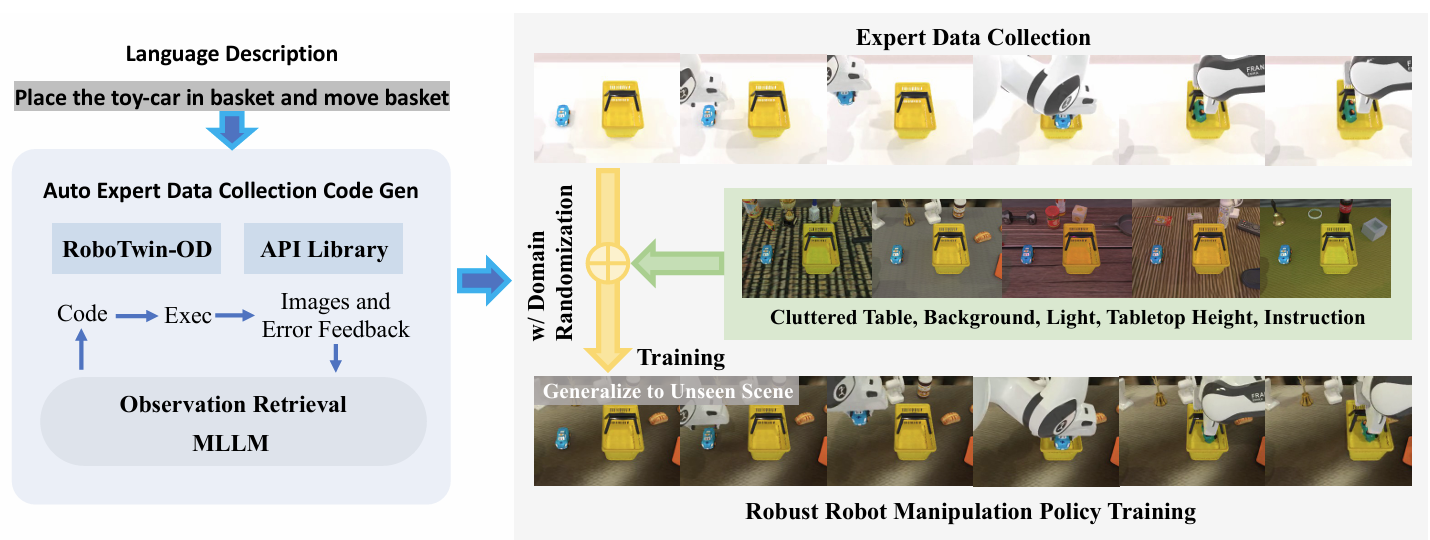
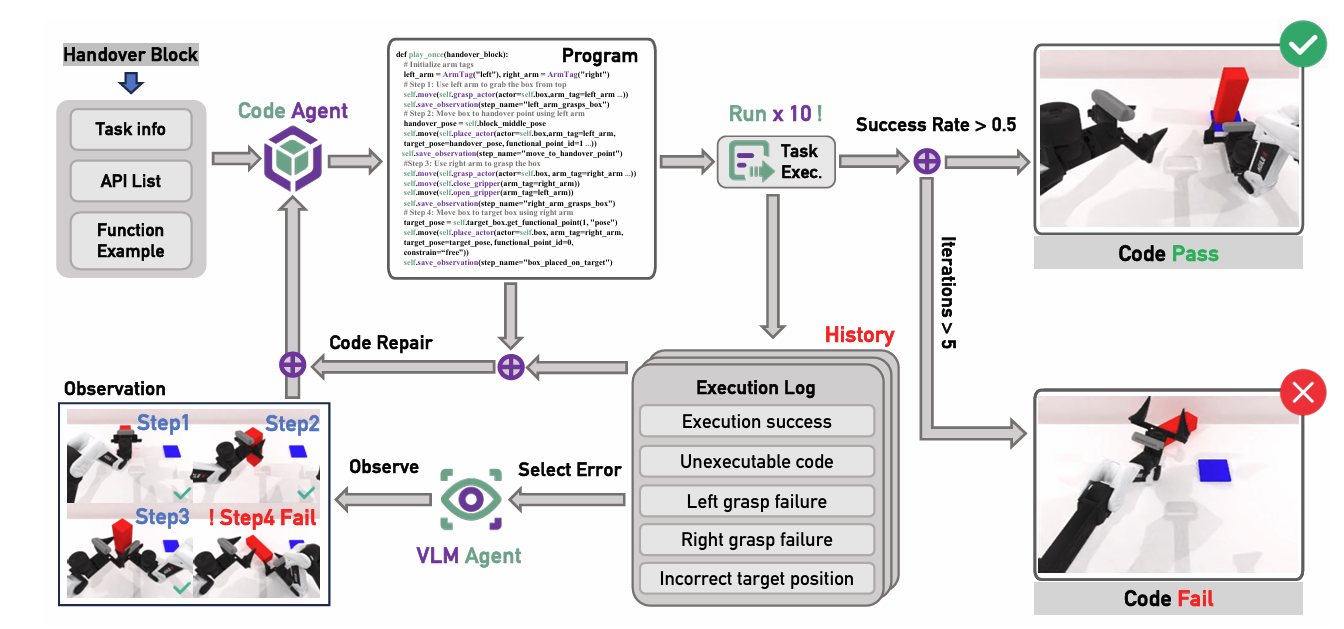
一个高效自动化采集无穷的高质量数据的框架
2.Why?
缺少高质量训练数据;采集强度大难以规模化;仿真做自动化数据生成较困难;数据不够多样
3.How?
在1.0基础上增加了:
升级了API库,对代码进行了优化,提升了代码的可读性
覆盖了更多的技能
LLM生成部分增加了视觉反馈
在原来的点轴系统上设计了不同的语义轴支持抓取时使用不同的姿势
场景由单一白色变为不同的背景材质
增加了光照桌子高度的变化
轨迹上多语言指令
背景增加了其他物体
4.Takeaways:
1.在低自由度的机械臂上有明显涨点,在高自由度的机械臂上基本不变
因为加入的随机抖动对高自由度的来说没有什么帮助,而低自由度的解空间相对比较小,加入后有利于涨点,因为扩大了解空间
2.跨域泛化可以通过很好的预训练做到,在新场景中可以只提供干净的场景就可以泛化
RoboTwin 2.0 | arxiv 2025.8.27(preprint) | Paper Reading